Work
Patents, publications, and projects — from research to production.
Patents
3US Patent
Tool Calibration for Manufacturing Robots
Patented method for automated tool calibration in industrial robotic welding systems, enabling higher accuracy and reduced setup time in production environments.
US Patent
Techniques for Path Clearance Planning
Novel path clearance planning techniques for robotic manipulators operating in constrained industrial workspaces, ensuring collision-free seam approach and retract motions.
US Patent
Generating Simulated Weld Paths for a Welding Robot
System for generating and validating simulated weld paths, bridging the gap between offline programming and real-world robotic welding execution.
Publications
5Clearance Planning for Seam Approach and Retract in Autonomous Robotic Welding
Developed clearance planning algorithms deployed in production autonomous welding systems, solving the critical problem of collision-free torch approach and retract motions in cluttered weld environments.
Motion Planning for Fully Autonomous Welding
End-to-end motion planning framework for fully autonomous robotic welding — from weld path generation to execution — deployed at scale in industrial manufacturing.
IROS 2021
Search-Based Path Planning for a High Dimensional Manipulator in Cluttered Environments
Tackled path planning for a 21-DOF snake robot navigating cluttered gas turbines. Developed dynamic optimization-based actions, lazy generation strategies, and heuristics reasoning about homotopy classes with Dynamic Thompson Sampling.
Topology Guided Path Planning for a Snake Robot in Cluttered Environments
Developed topology-guided planning methods that leverage environmental structure to efficiently navigate high-dimensional snake robots through tight, cluttered spaces.
IROS 2020
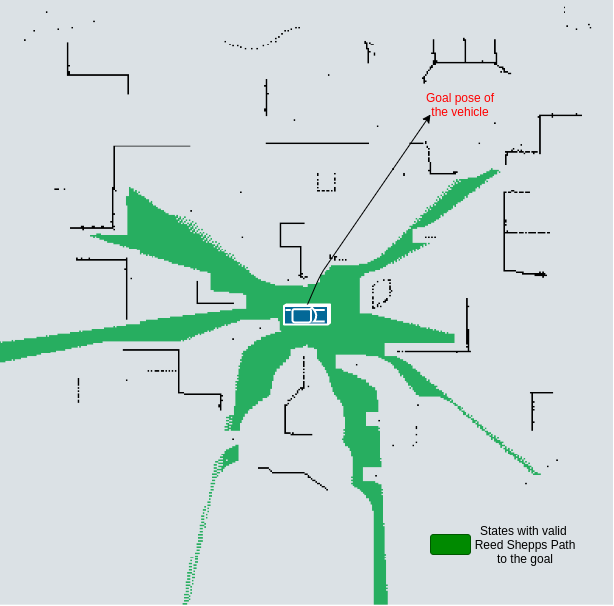
Learning to Use Adaptive Motion Primitives in Search-Based Planning for Navigation
Proposed a learning-based approach for intelligent activation of adaptive motion primitives using deep learning, achieving over 2x speedup in planning times for 3-DOF navigation with Reeds-Shepp paths.
Projects
3Motion Planning for Localization in Non-Gaussian Belief Spaces
Developed a method for motion planning under uncertainty to disambiguate multi-modal hypotheses on robot state, planning actions that achieve unimodal belief in finite time.

Motion Planning for an Autonomous Airship
Developed motion planning algorithms for autonomous airship navigation, combining search-based planning with vehicle dynamics constraints.