Raghav Sood
Staff Engineer · Tech Lead, Obsidian 2.0 · Path Robotics
Building robots
that learn and adapt.
Staff Engineer turning robotics research into real-world autonomous systems. Shipping ML-powered motion planning to production. Carnegie Mellon alum.
Welding
Autonomous precision.
ML-powered motion planning guides 6-axis robots through complex weld seams — collision-free torch approach, adaptive path execution, all without human intervention.
Manipulation
Intelligence in motion.
From research at CMU to 3 US patents — building robots that plan, adapt, and execute manipulation tasks in cluttered, real-world environments.
Production
Shipping at scale.
Obsidian 2.0 — Path Robotics' AI stack powering fully autonomous welding in production. Reinforcement learning meets industrial manufacturing, every day.
Featured
Selected Work
US Patent
Techniques for Path Clearance Planning
Novel path clearance planning techniques for robotic manipulators operating in constrained industrial workspaces, ensuring collision-free seam approach and retract motions.
Motion Planning for Fully Autonomous Welding
End-to-end motion planning framework for fully autonomous robotic welding — from weld path generation to execution — deployed at scale in industrial manufacturing.
IROS 2020
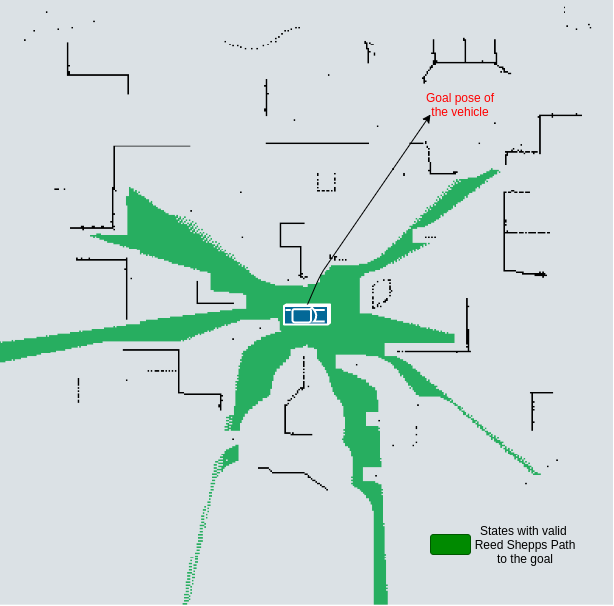
Learning to Use Adaptive Motion Primitives in Search-Based Planning for Navigation
Proposed a learning-based approach for intelligent activation of adaptive motion primitives using deep learning, achieving over 2x speedup in planning times for 3-DOF navigation with Reeds-Shepp paths.
About Me
Staff Engineer at Path Robotics. Shipping ML-powered motion planning from research to production autonomous welding systems. CMU Robotics alum.
Read more →Writing